今回はルールで指定された全てのセンサーを使ってゴールを目指そう!
今回もチャレンジ月間の種まきロボットを作成していきます。そして、校舎で行われる大会を目指していきます!
前回はロボットを組立て動かすところまで達成しました。今回は大会でより高得点を取れるように、ルールで指定されたセンサーを全て使ってロボットを制御していきます。
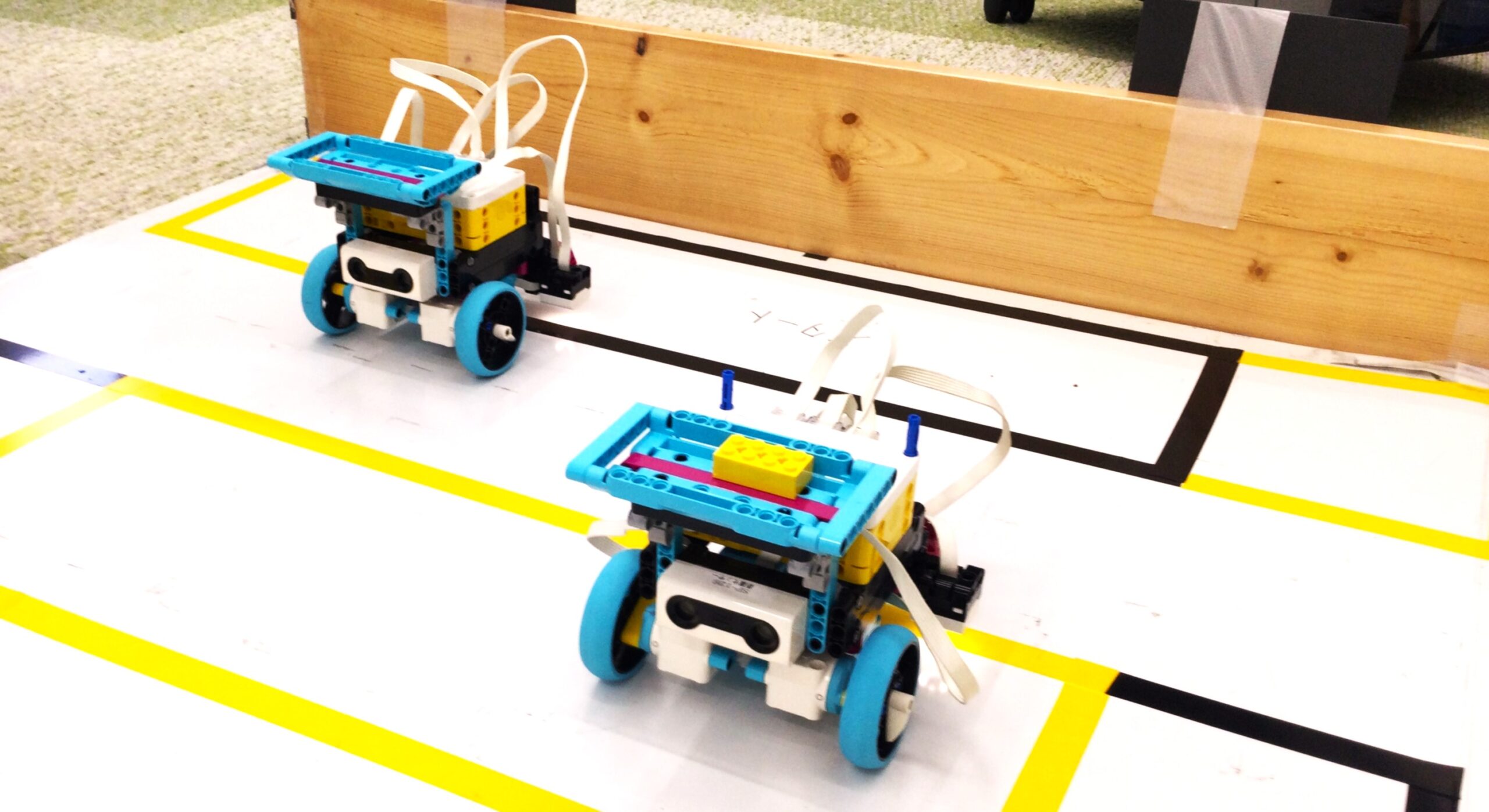
今回のルールで指定されたセンサーは超音波センサーと色を識別する光センサー、タッチセンサーの3つになります。

まずは前回と同様にロボットを組み立てていきます。今回は2回目という事もあり、チームで協力しながらスムーズにロボットを組み上げる事ができました。

次にルールを確認しながら、どのセンサーをどの場面で使用するかを考えていき、実際にプログラムを書いていきます。
センサーの種類によって感度が異なるなど特徴があるので、実際にロボットを動かしながら動きを確かめていき、プログラムの修正をおこなっていきます。
この流れを繰り返し行っていくことで、少しずつ今回の目標のロボットの動きを目指していきます。
千里の道も一歩から。一見スマートな作業に見えるプログラミングも地道な積み重ねが何より大切です。
センサーはロボットを自立的に動かすために欠かせない物になります。自由にロボットを作れる様になるのには、複数のセンサーを上手に使いこなせるようになることが重要です。
□まとめ□
今回はチャレンジ月間の大会に向けて大会のルールに則ったロボットの動きをプログラムする事が出来ました!
次回は大会に勝つために、どうしたらロボットの動きを速く精度よくできるのかを考えてきましょう!